Team JollyFish
An experiment in transportation efficiency for 24-775 Bioinspired Robot Design and Experimentation At Carnegie Mellon Univeristy

The course posed the question:
”Can we learn from biology to inform robotic system design?”
The answer:
“Yes, but its really, really hard”
Overview
We set out to see if we could improve aquatic robotic transportation efficiency. Amongst animals, this is discussed via the “cost of transport” metric, of which the jelly is king.
Building a robot that uses an undulating propulsion mechanism like that of a jellyfish and comparing against a standard propellor propulsion method could prove that robots could benefit from jellyfish mimicry.
See more here

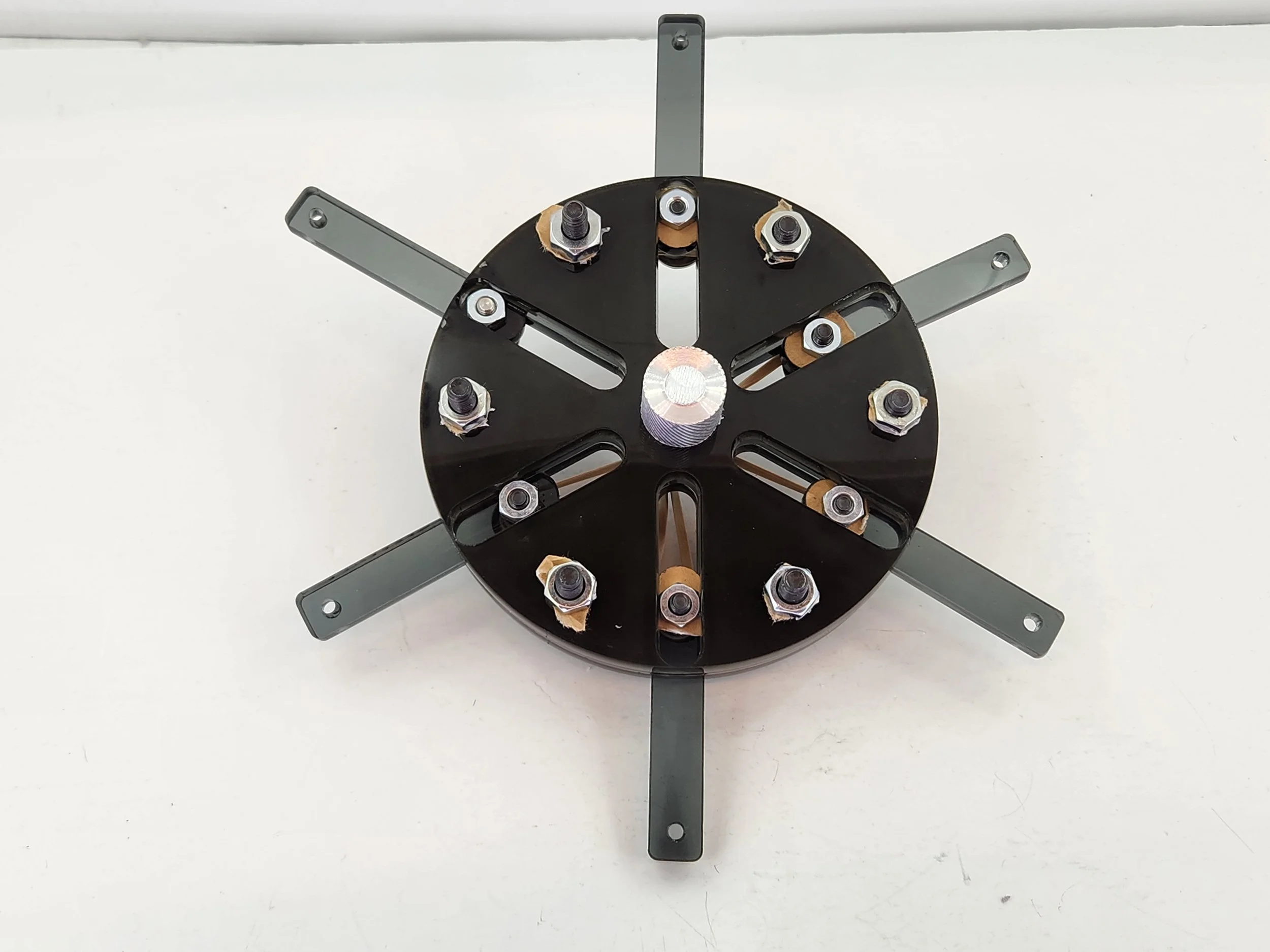
Expansion mechanism iteration 1:
The main goal of the first mechanism was to get a basic idea of the design as fast as possible. It was made out of acrylic so that it could be laser cut quickly.
Immediately it was clear that the first design was too heavy, too thick, and there was too much friction in the system to allow for efficient transport. These would all be rectified in future iterations.

-
1/4 in. acrylic, lasercut
aluminum central shaft, machined
Steel fasteners
total mass = ~1 lb
-
The three acrylic sheets alone add up to .75 in. The bolts that hold them together brinf the total up to over an inch.
-
I left the paper on the non slider components. This allowed it to act like a shim and allow the extension components to move. However, binding would still occur when these pieces rotated.
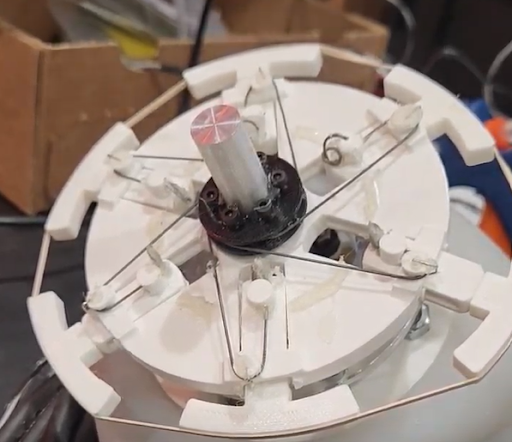
Expansion mechanism iteration 2:
This version was designed to reduce friction, mass, and space claim. It succeeded on all three.
The key difference was that the linear rails from before are guided with ball bearings that are in tern constrained by the 3D prints themselves. The mechanism is passively driven inward by the elasticity of the jelly bell, and outward by the cables and drive shaft.
-
3D printed PLA body and linear slides
3D printed winch drums
Aluminum axle, machined
total mass = ~0.2 lb
-
The thickness of the machinism was reduced dramatically to just over 1/4 in.
-
The 3D printed body is able to house ball bearings which constrain the sliders in 5 DOF. This led to a massive reduction in both mechanism thickness, and friction/binding.
Strain Wave Gearbox:
This gearbox was designed to fit in the small spaceclaim availible, and supply enough torque to expand the bell. The other benefit of a strain wave gearbox is that there is zero backlash, which is important given that we are using it to finely control the position of the expansion mechanism.

Jellyfish Bell:
The outer surface of the jellyfish is called the bell. This surface is what ultimately pushes fluid backward, and propels the jellyfish. We chose to use a material called ecoflex, which has similar mechanical properties to jellyfish tissue, but can be difficult to mold.